无人机通识
一、操控
1.1 遥控器
识图(以下为美国手)

任务应会操控(未提及操作较少用)
- 遥控器开机:开机键(短按,0.5s后长按直至听到遥控器开机音)
- 飞到航线标高(左手):上升到航线标高,原地左右转查看并评估航线标高周围障碍物风险
- 二次评估风险:对没把握风险点,前进(右手)+原地左右转(左手)飞到航线区域内风险点上方,通过左波轮调整视角确认,风险点如高压线顶、高楼顶、高山旁、塔吊顶。
1.2 历次炸机记录
- 雾天飞行:视线模糊,传感器无法识别障碍物,撞树上,两翅膀粉碎
- 高楼间飞行:信号丢失,飞机返航迷路,尸骨无存
- 山间高空高压线:未二次评估风险,直接航拍,撞高压线,飞机解体(高压线对飞行器有强磁场,吸引与干扰),建议高或低高压线5米以上
- 施工工地塔吊:航线经过塔吊臂,避障功能不识别,坠毁解体
- 沙地起飞:砂砾进入螺旋桨电机,空中电机骤停,坠机,建议放车顶中心起飞,自动返航,并评估降落末期是否需要手动暂停并接管降落操作
- 低电量返航:低于最低电量返航,飞行器在墙边启动避障功能,导致无法降落,徒手接飞行器,一翅膀折断
- 变电站旁飞行:飞行器信号丢失,莫名坠落,强磁场干扰,建议起飞点一定远离此类建筑
1.3 原则性控制
- 不要相信自动避障
- 没把握的风险点一定二次评估
- 规避高磁场区域
- 遥控器与飞行器连线尽量不要有遮蔽物
二、航线规划
2.1 定点
收集定位:提前收集所有点位的微信定位,在高德中打开并收藏点位,综合规划每天开车行程
点位标注:下载BIGEMAP手机软件,标记点位、区域、名称,可内业完成,也可到点位后完成
项目图层新建及选中
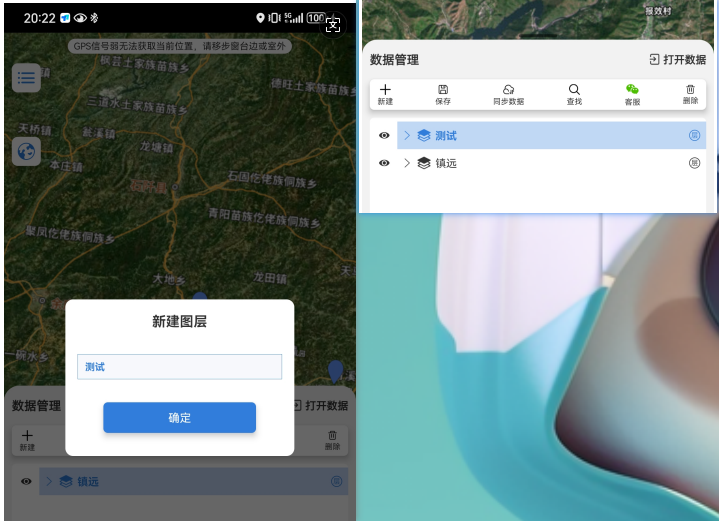
两种点位标注

项目图层导出(提交设计人员)

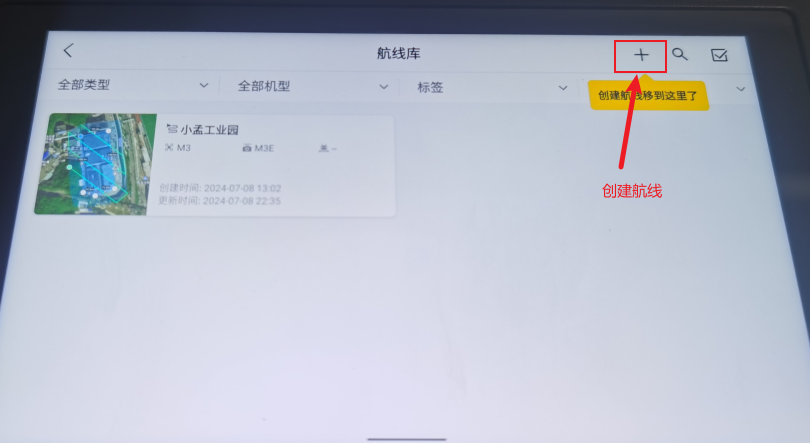
2.2 航线编辑
主界面

屏幕下拉连接个人热点

进入主界面的“航线”
选择面状航线=>围区(确认选M3E)=>航线编辑=>保存(左上角圆圈)


正射采集:相机镜头垂直向下(90°俯角),与地面保持正交,仅获取地物的顶部信息,无法捕捉侧面纹理
倾斜采集:相机以多角度(如90°、45°、30°等)拍摄,同时获取地物的顶部、侧面等多角度纹理,数据量更大,但能构建更真实的三维模型
三、任务执行
3.1 部件展示
- 箱内展示

3.1 开机顺序
手机开热点
遥控器开机:开机键(短按,0.5s后长按直至听到遥控器开机音),航线编辑结束前,都不要打开飞行器(省电)
飞行器开机:取下摄像头保护盖,检查翅膀旋转,开机键(短按,0.5s后长按直至听到飞行器开机音)



3.2 任务执行
3.2.1 起飞
- 复核空域:检查飞机正上方是否有障碍物,特别是电线
- 复核地面:是否为沙地,考虑放车顶中央
3.2.2 遥控器界面
从主界面进入飞行界面(等飞机图标显示再进)
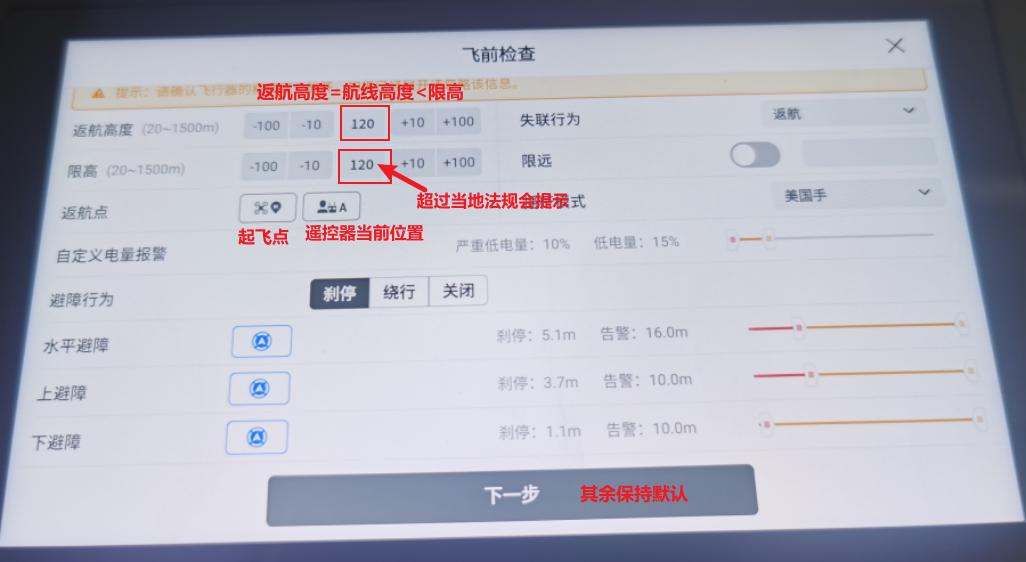
飞行前检查
飞行界面=>起飞=>上升到航线高度=>选择航线=>执行航线=>自动返航
 起飞
起飞  降落
降落  启动上传航线
启动上传航线 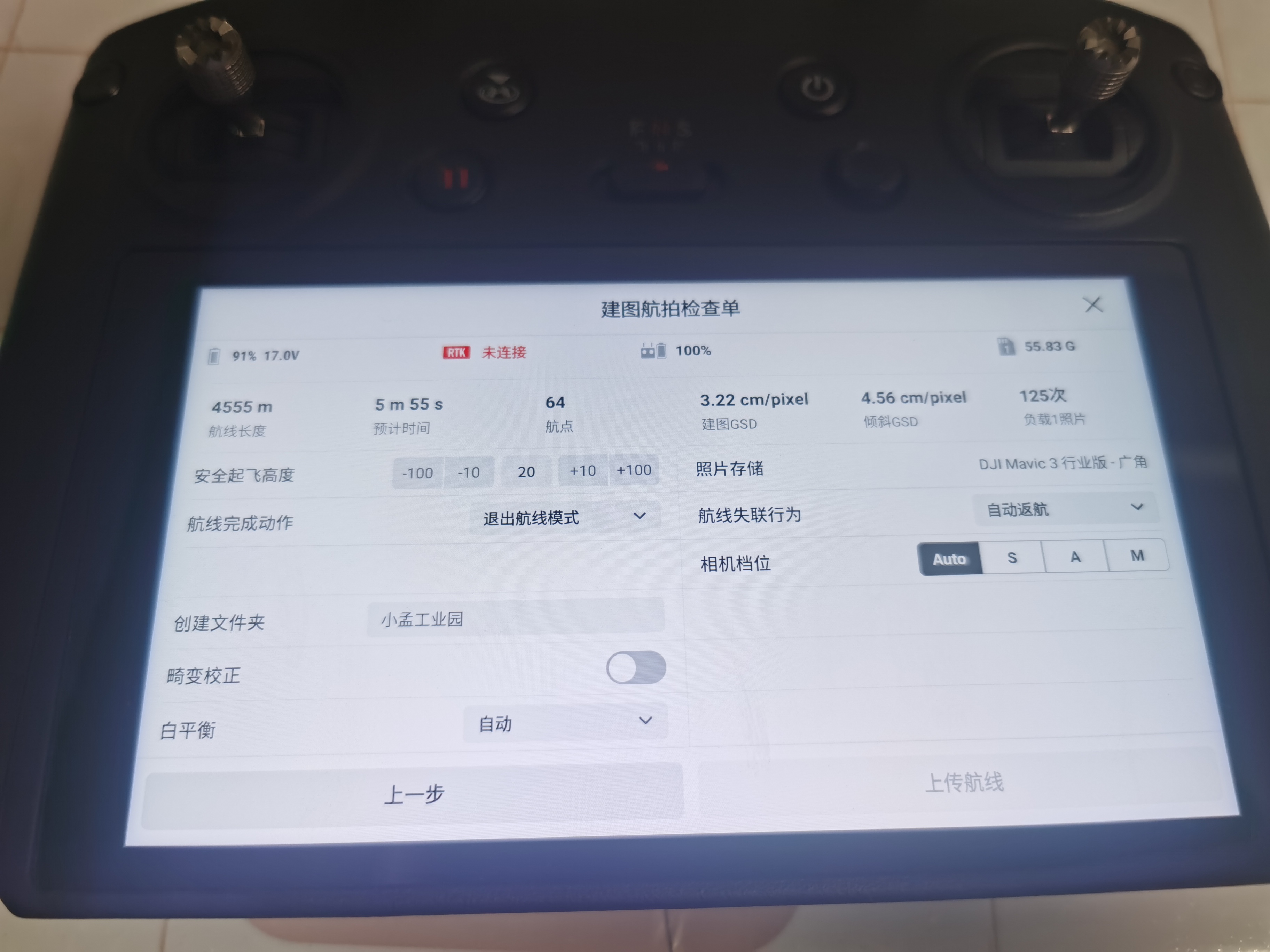 航线调整
航线调整 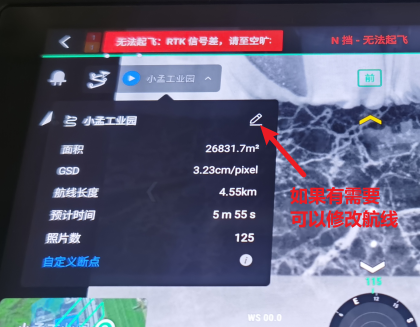
3.2.2 关机
- 关闭飞行器:关机(短按,0.5s后长按直至听到飞行器关机音),收翅膀,加摄像头保护盖,装箱
- 关闭遥控器:关机(短按,0.5s后长按直至听到飞行器关机音),收天线,装箱
- 锁箱子
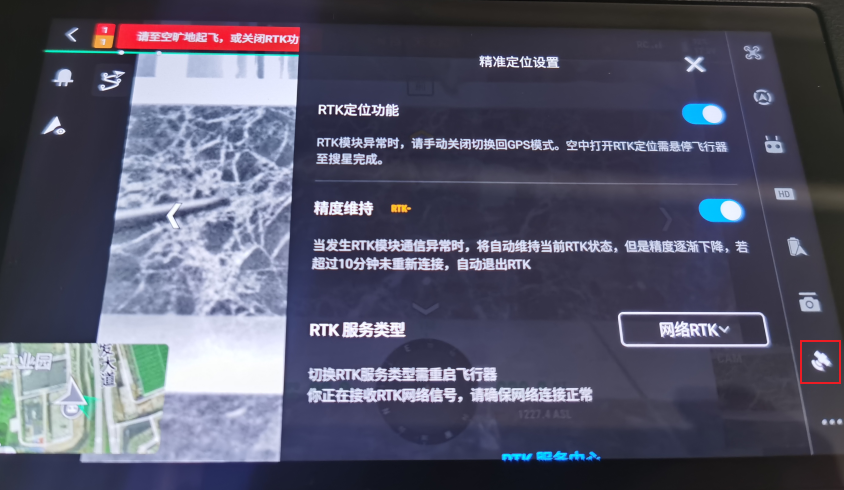
3.3 飞行设置